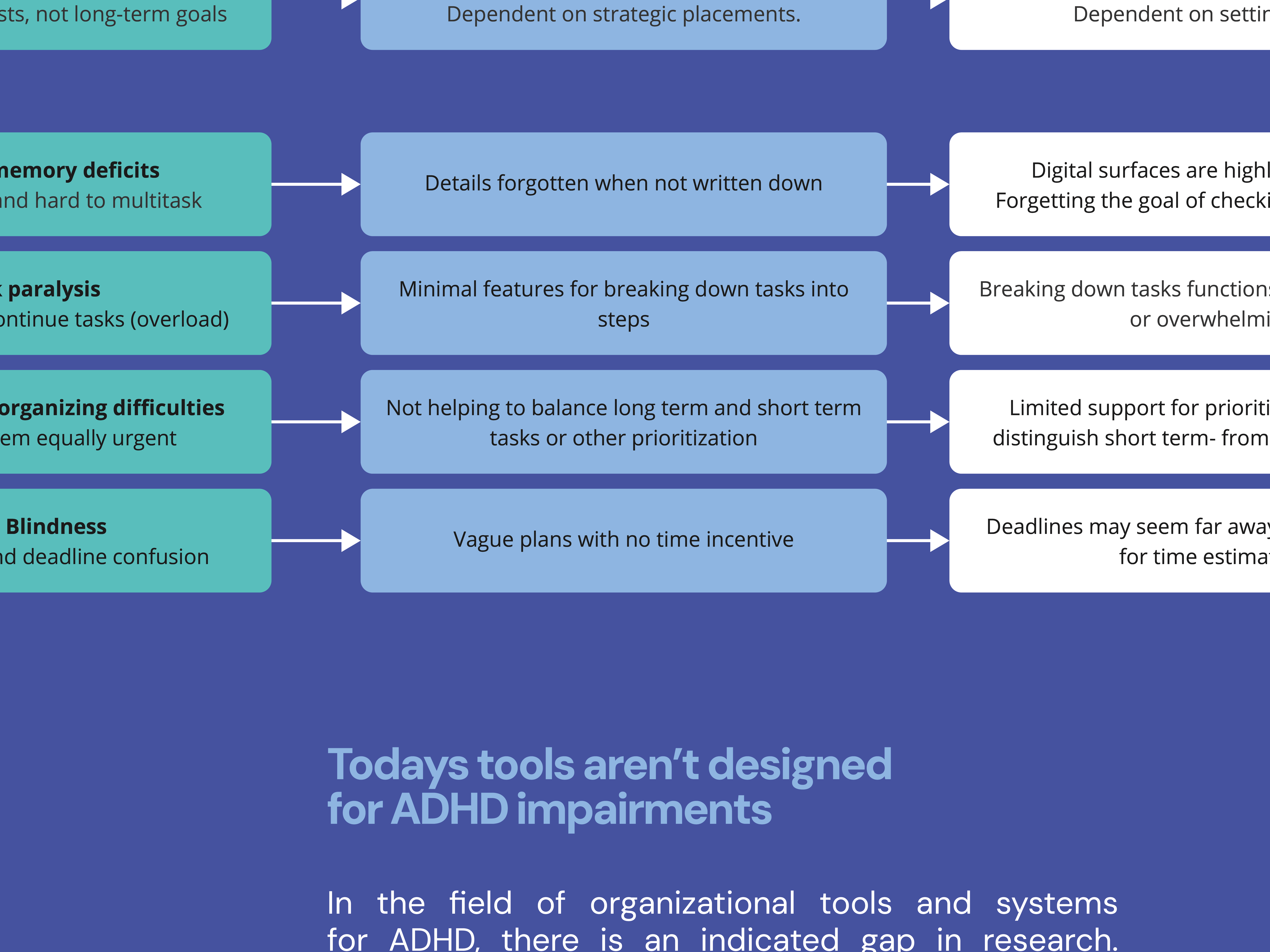
Summary
As a mechatronics project, a rebellious trashcan was developed with Arduino components, sensors, motors and air cylinders, which operates as a functional trashcan when you are around, for example by opening the lid when you knock on it, however it turns evil and sprays graffiti when it's alone.
Process video
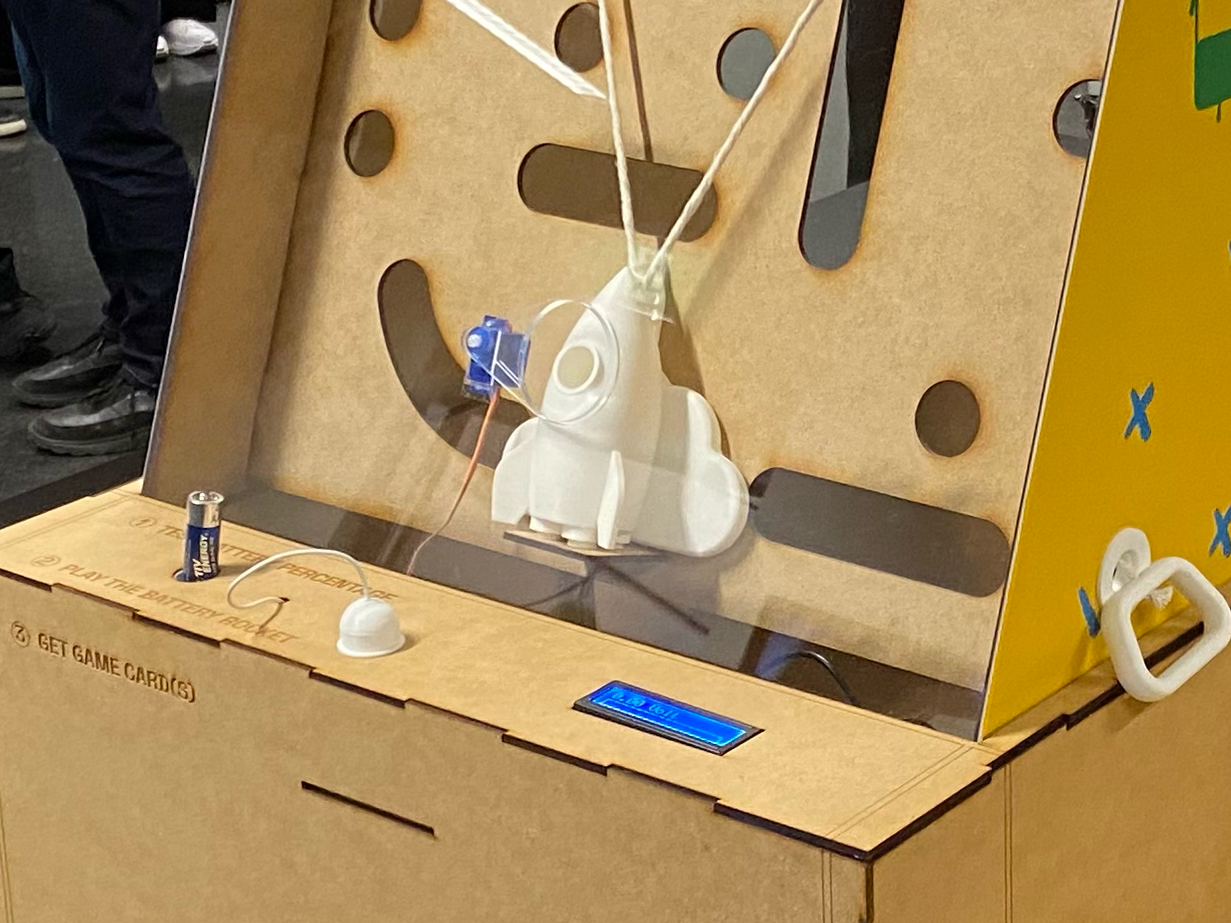
Process image during the making of the rotating box base with air cylinders


Demonstration video without graffiti
The sequence starts with a sound sensor that recognises when you knock on the trashcan, which triggers the air cylinders to push the lid open to reveal the LED eyes. The distance sensor then registers that there isn't a person in front of the machine (it is alone), and can now move on to the rebellious phase where it turns around and opens the door for the graffiti arm which is motorised and coded to stop at random angles while spraying paint on the canvas. It finishes it cycle of spray painting and turns back and returns to its base position, before giving us a wink, and it's ready to repeat the cycle.
Sensors (sound and distance), LED-eyes, motorised arm and air cylinders (raising/lowering/turning).
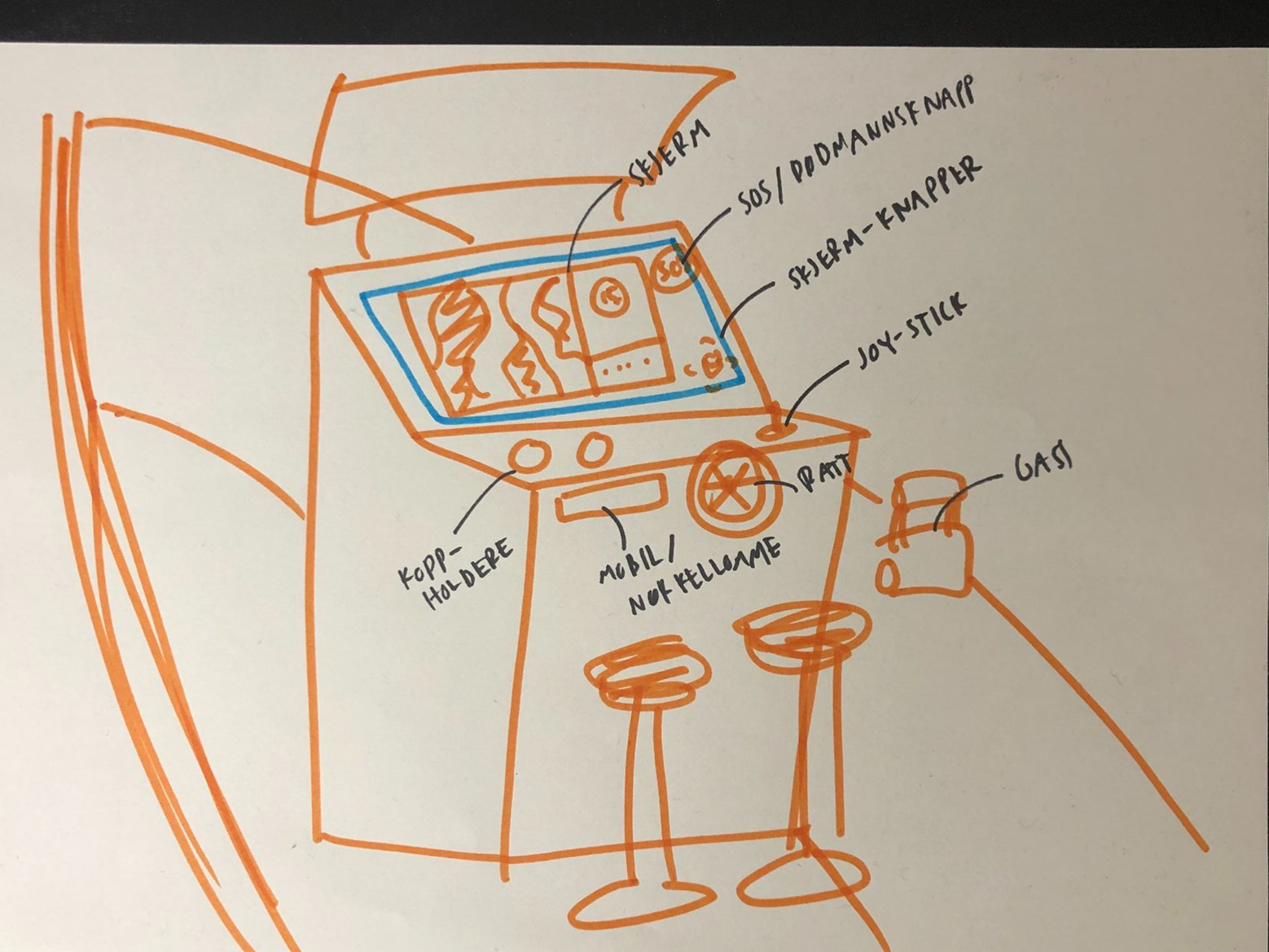
Initial concept sketch

Paint spray test
reflection
This Arduino project was one of the most challenging and rewarding mechanical projects I’ve tackled. Building a trashcan with a mechanical arm, LED eyes, air cylinders to open the lid and rotate the machine, and a mechanical door to reveal the arm required constant trial and error. Integrating the distance and sound sensors pushed me to think about how interactions feel, not just how they function. The intense debugging phase, and the sleepless night before presentation, taught me patience, persistence, and the importance of embracing mistakes as part of the learning process. I wouldn’t have it any other way—it was immensely fun.